Langkah-langkah Kalibrasi Sensor Ultrasonik dengan Contoh Kode
Panduan Praktis untuk Kalibrasi Sensor Ultrasonik
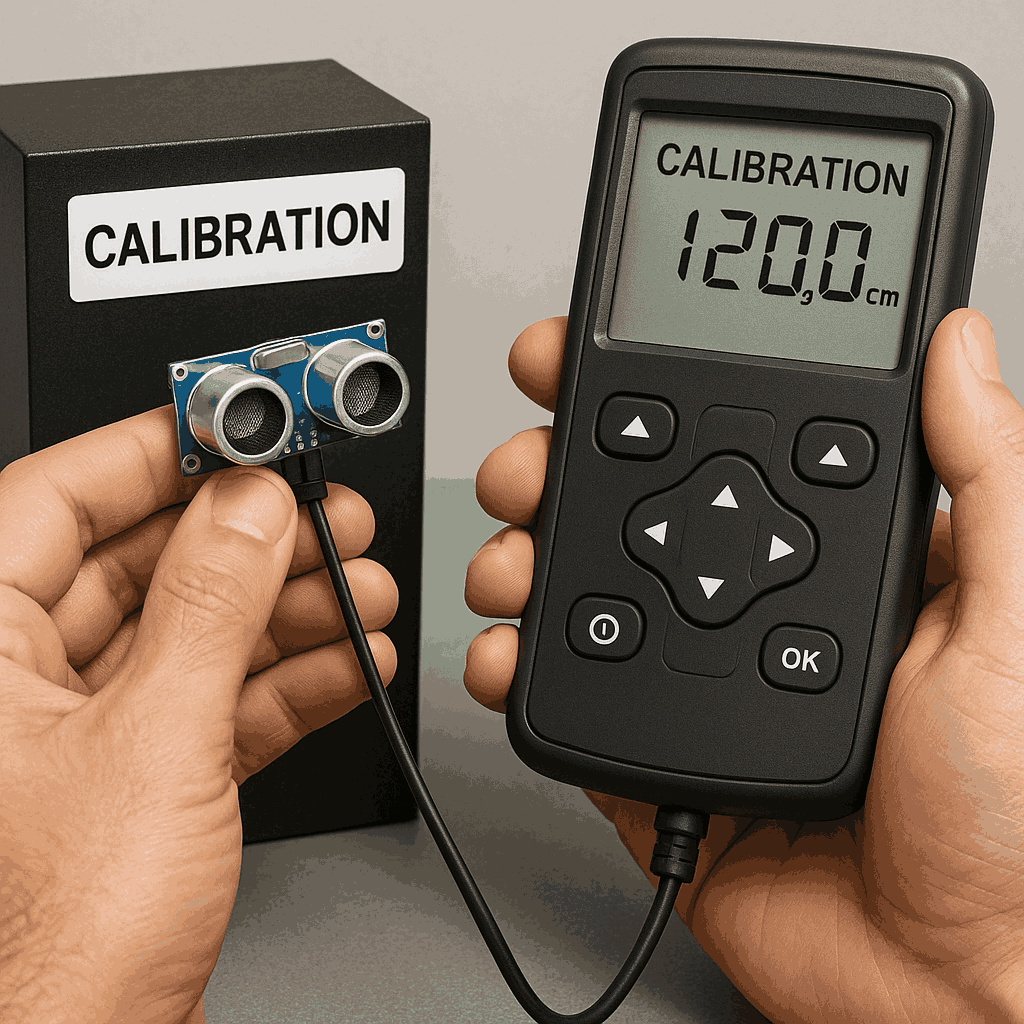
Kalibrasi Sensor Ultrasonik
Kalibrasi sensor ultrasonik adalah proses penting untuk memastikan bahwa sensor berfungsi dengan akurat. Sensor ini sering digunakan dalam berbagai aplikasi, termasuk pengukuran jarak dan penghindaran rintangan pada robot.
Langkah pertama dalam kalibrasi adalah menyiapkan alat yang diperlukan. Anda membutuhkan sensor ultrasonik, mikrokontroler seperti Arduino, dan pengukur jarak yang akurat sebagai referensi.
Setelah alat siap, langkah kedua adalah menghubungkan sensor ultrasonik ke mikrokontroler. Pastikan untuk menyambungkan pin Trigger dan Echo dengan benar. Berikut adalah contoh kode sederhana untuk membaca jarak menggunakan Arduino:
#include#define TRIGGER_PIN 12 #define ECHO_PIN 13 #define MAX_DISTANCE 200 NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); void setup() { Serial.begin(9600); } void loop() { delay(500); unsigned int uS = sonar.ping(); Serial.print("Distance: "); Serial.print((uS / 2) / 29.1); // Convert to cm Serial.println("cm"); }
Setelah Anda menjalankan kode, bandingkan hasil pembacaan sensor dengan pengukur jarak akurat. Jika ada perbedaan, Anda perlu menyesuaikan parameter dalam kode untuk mendapatkan pengukuran yang lebih tepat.
Terakhir, lakukan pengujian berulang untuk memastikan konsistensi hasil kalibrasi. Ini adalah langkah penting untuk memastikan bahwa sensor ultrasonik dapat diandalkan dalam aplikasi yang lebih kompleks.
| Langkah | Deskripsi |
|---|---|
| 1 | Siapkan alat yang diperlukan |
| 2 | Hubungkan sensor ultrasonik ke mikrokontroler |
| 3 | Uji dengan kode dan bandingkan hasil |
| 4 | Sesuaikan parameter jika diperlukan |
| 5 | Lakukan pengujian berulang untuk validasi |
Website: codingchan.com.
Alamat: Karanganyar, Solo, Jawa Tengah.